

 QQ
QQ
NX100可构筑用一台控制柜同时控制多台机器人或多个外部轴系统。
协调/独立控制功能是使机器人或外部轴协调作业或者独立作业的功能,该功能可根据作业要求选择***佳动作方式。
1.协调控制
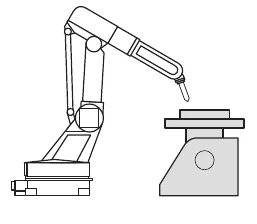
协调控制功能是指同时控制多台机器人与工装轴的功能。
〈例〉
可用于机器人与外部轴协调作业。
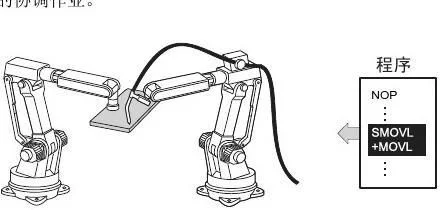
进行协调控制的程序称为协调程序。协调程序同时控制两个轴组。
2.外部轴工作站协调系统
2.1概要
所谓外部轴工作站协调系统是指由外部轴工作站持工件,机器人持作业工具,二者边协调边作业的系统。
为了使外部轴和机器人同时动作,需要进行协调程序的示教。
外部轴工作站与机器人之间的主从关系,通常设定为外部轴工作站为主侧,机器人为从侧。
2.2 系统操作流程
登录轴组组合
机器人与外部轴间协调校准
新建协调程序
登录移动命令
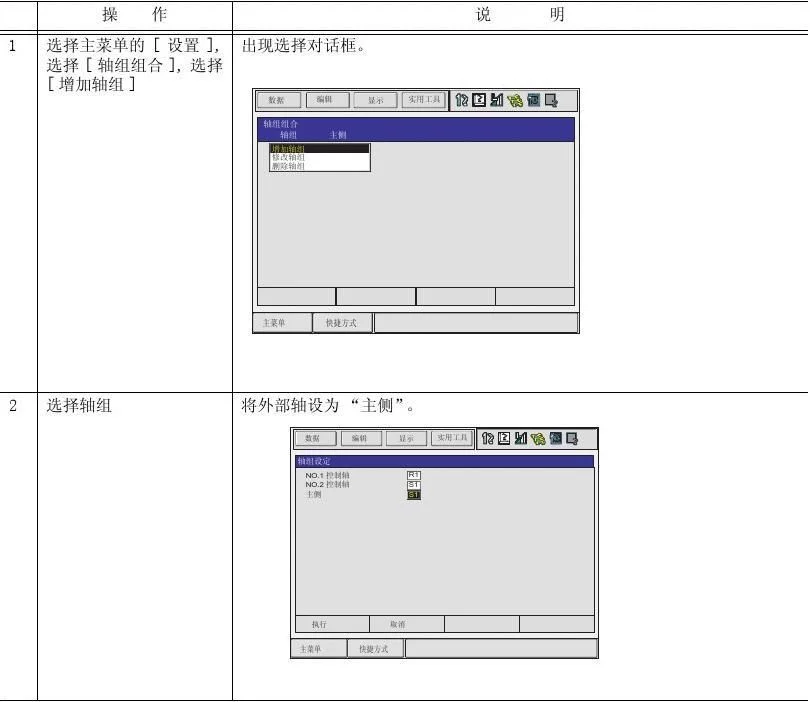
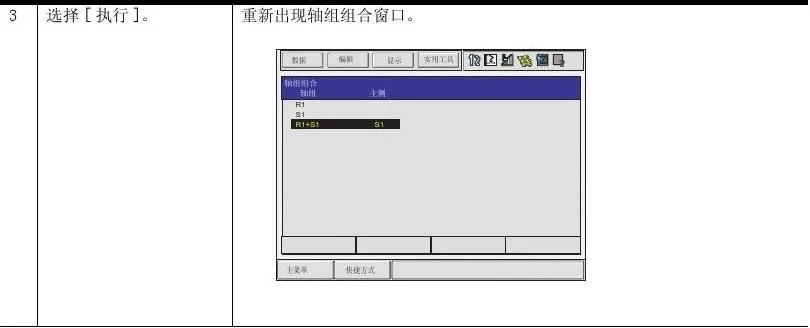
2.3 登录轴组组合
如果不预先登录轴组组合,新建程序时就没有可以选择的轴组。
2.4 机器人与外部轴间的协调校准
要使机器人本体与外部轴工作站间的协调工作,需要提前登录相互的位置关系。这种相互关系的设定就是机器人本体、外部轴工作站间的校准。
本体:
HW0313741-1
HP20D 3BC
HW1303369-1 S
HW1303631-1 U
HW9381003-1 U
本体:
HW0313741-1
HP20D 3BC
HW1303369-1 S
HW1303631-1 U
HW9381003-1 U
在进行机器人与外部轴校准之前,务必先准备进行机器人工具的校准。
■ 校准位置的示教
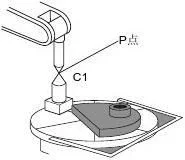
对于带1个旋转轴的变位机
1. 在外部轴的旋转台上,确定任意点(P点)(尽可能远离旋转台中心)机器人控制点与P点对齐,登 录C1。
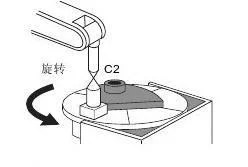
2. 让外部轴只旋转任意的量。虽然旋转量没有限制,但是,请将旋转量达到30°以上。旋转方向正负(+-)均可。旋转后的P点与本体控制点重合,登录C2。
3. 按照2旋转的方向,旋转外部轴,旋转后的P点与本体控制点重合,登录C3。
轴承:
HW9482144-A U
HW0381872-A
HW0312734-1
HW0312735-1
此文来源于网络2021-02-07
想了解更多详情点击:安川工业机器人配件服务中心
轴承:
HW9482144-A U
HW0381872-A
HW0312734-1
HW0312735-1
此文来源于网络2021-02-07
想了解更多详情点击:安川工业机器人配件服务中心
